Simultaneous Localization and Mapping via Monte Carlo Localization
This project implements FastSLAM for UAV navigation: A particle filter-based approach for simultaneous localization and mapping in unknown environments.
Controller Design and Stability Analysis for a Gravity-Assisted Under-Actuated Robot Arm Vehicle
Designed and tested a controller for a gravity-assisted under-actuated robot arm vehicle, focusing on linearization, controllability, and stability analysis.
Topographical Mapping via a Micro-Quadcopter
Utilizing a microquadcopter for precise topographical mapping, integrating aerial imagery and data processing to create detailed terrain models.
Controller Design and Flight Data Collection for an Unpowered Glider Simulation
Developed and tested a controller for an unpowered glider through 1,000 simulation runs to collect and analyze flight data.
Visualizing the Double Pendulum
A dynamic simulation showcasing the chaotic motion and intricate behavior of a double pendulum system.
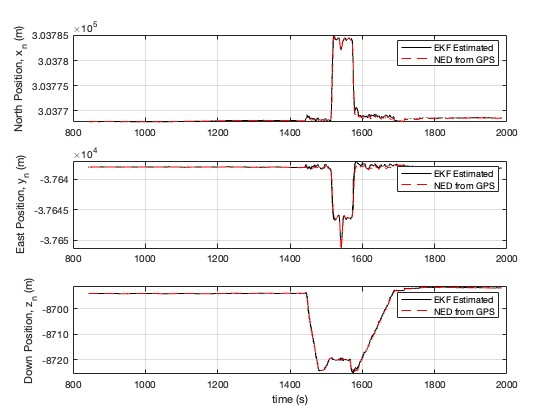
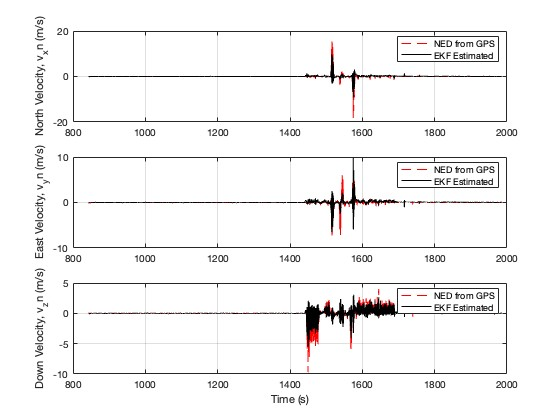
Localization Using GPS and IMU Information via an Extended Kalman Filter Framework
Estimating NED position and velocity using Extended Kalman Filter: Enhancing UAV state estimation through data fusion and sensor update frequency manipulation.